
自主显微眼科手术机器人系统研发成功,验证临床可行性

根据世界卫生组织所做的统计,全球已经有超过二十二亿人有视力方面的损害状况,或者处于失明的相关状态。因为眼睛的软组织结构具备精细的特点,并且操作空间呈现出狭小的特性,所以医生在眼内进行手术时的手动操作面临着极大的挑战。自主机器人手术系统在眼科手术里的应用,能够凭借更为智能、精准的操作控制力,提升手术的安全性,缩短外科医生的学习曲线,为众多眼科疾病的治疗提供新出种种可能性,让更多患者从中受益 。
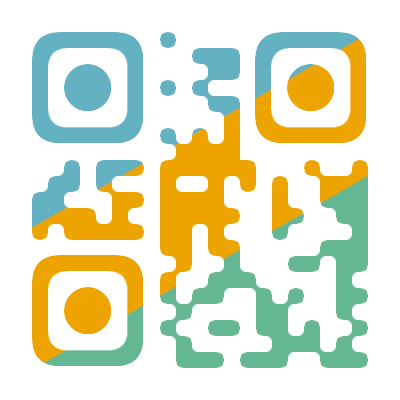
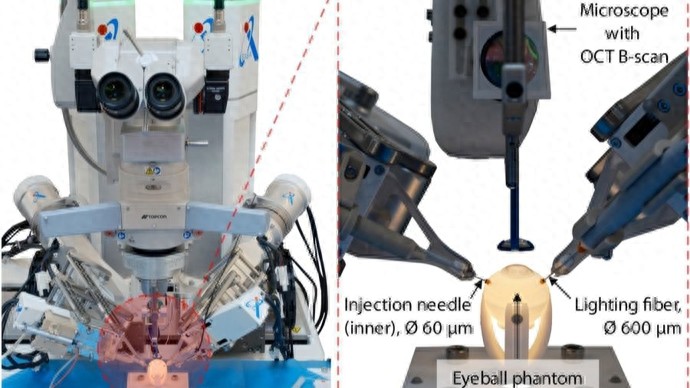
中国科学院自动化研究所边桂彬研究员所带领的课题组,成功研发出一款自主显微眼科手术机器人系统,并且对其临床可行性进行了验证。这款系统在整个眼内空间能够实现自主的视网膜下以及血管内注射,能够显著提高眼底注射的精确性,提高安全性,提高一致性,最大限度地减少医源性损伤,还能够辅助外科医生更加专注于手术设计以及监督任务。相关成果在近日发表于《科学•机器人》 。
显微眼科机器人主要研究人员。受访单位提供
研究团队所研发的,具备自主功能的显微眼科手术机器人系统,创新性地构建起,涉及术中三维空间感知的,跨尺度精确定位的,以及轨迹精准控制的核心算法模块。
在三维空间感知这块儿,研究团队生出了一种多视角空间融合法子,能有效搞定多模态眼内成像里的成像异质性以及动态空间失准情形,搭建起术中动态更新的全局三维地图,达成了对眼内区域的全面感知。在精确定位这儿,他们弄出了一种多传感器数据融合办法,处理了检测范围、误差幅度跟采样频率的差别,让机器人手术器械尖端于眼内区域达成精确的宏观 - 微观定位。
对于轨迹控制而言,他们针对机器人末端执行器的轨迹,实施精确规划,并且,通过结合在人监督状况下的力 - 位置 - 影像混合控制,保障了手术的安全性。
在眼球假体的视网膜下注射与血管注射实验验证里,该系统实现了100%的注射成功率。在离体猪眼球的视网膜下注射与血管注射实验验证中,该系统达成了100%的注射成功率。在活体动物眼球的视网膜下注射与血管注射实验验证方面,该系统做到了100%的注射成功率。与医生手动手术相比较,平均定位误差减少了79.87%,表现出更高的安全性和精准性。与医生主从操作机器人手术相比较,平均定位误差减少了54.61%,展现出更高的安全性和精准性。
该研究成果,为眼内手术之自主化,开辟了新的技术路径,验证了自主机器人于显微手术里应用的可行性,有望推动眼科手术治疗朝着智能化、精准化方向升级,在远程医疗以及极端环境等复杂场景之中,展现出广阔的应用潜力 。